Robots¶
Overview¶
We provide a wide variety of Robots that can be imported into the Simulator.
| Agent Name | DOF | Information | Controller |
|---|---|---|---|
| Mujoco Ant | 8 | OpenAI Link | Torque |
| Mujoco Humanoid | 17 | OpenAI Link | Torque |
| Husky Robot | 4 | ROS, Manufacturer | Torque, Velocity, Position |
| Minitaur Robot | 8 | Robot Page, Manufacturer | Sine Controller |
| Quadrotor | 6 | Paper | Torque |
| TurtleBot | 2 | ROS, Manufacturer | Torque, Velocity, Position, Differential Drive |
| Freight | 2 | Fetch Robotics Link | Torque, Velocity, Position, Differential Drive |
| Fetch | 10 | Fetch Robotics Link | Torque, Velocity, Position, Differential Drive |
| JackRabbot | 2 & 7 | Stanford Project Link | Torque, Velocity, Position, Differential Drive |
| LocoBot | 2 | ROS, Manufacturer | Torque, Velocity, Position, Differential Drive |
Typically, these robot classes take in the URDF file or MuJoCo XML file of an robot (in gibson2.assets_path) and provide a load function that be invoked externally (usually by import_robot of Simulator). The load function imports the robot into PyBullet.
All robot clases inherit LocomotorRobot. Some useful functions are worth pointing out:
{get/set}_{position/orientation/rpy/linear_velocity/angular_velocity}: get and set the physical states of the robot baseapply_robot_action: set motor control for each of the controllable joints. It currently supports four modes of control: joint torque, velocity, position, and differential drive for two-wheeled robotscalc_state: compute robot states that might be useful for external applicationsrobot_specific_reset: reset the robot joint states to their default value, particularly useful for mobile manipulators. For instance,Fetch.robot_specific_reset()will reset the robot to be something like this:

Here are some details about how we perform motor control for robots:
Say the robot uses joint velocity control
self.control == 'velocity'We assume the external user (say an RL agent) will call
apply_actionwithpolicy_actionthat is always between-1and1.policy_actionwill be scaled torobot_actionbypolicy_action_to_robot_actionbased on the action space. The action space is set byconfig['velocity']in the YAML config filerobot_actionwill be applied byapply_robot_action, which internally executes the following:
def apply_robot_action(action):
for n, j in enumerate(self.ordered_joints):
j.set_motor_velocity(self.velocity_coef * j.max_velocity * float(np.clip(action[n], -1, +1)))
Note that robot_action is a normalized joint velocity, i.e. robot_action[n] == 1.0 means executing the maximum joint velocity for the nth joint. The limits of joint position, velocity and torque are extracted from the URDF file of the robot.
Most of the code can be found here: gibson2/core/physics/robot_locomotors.py.
Examples¶
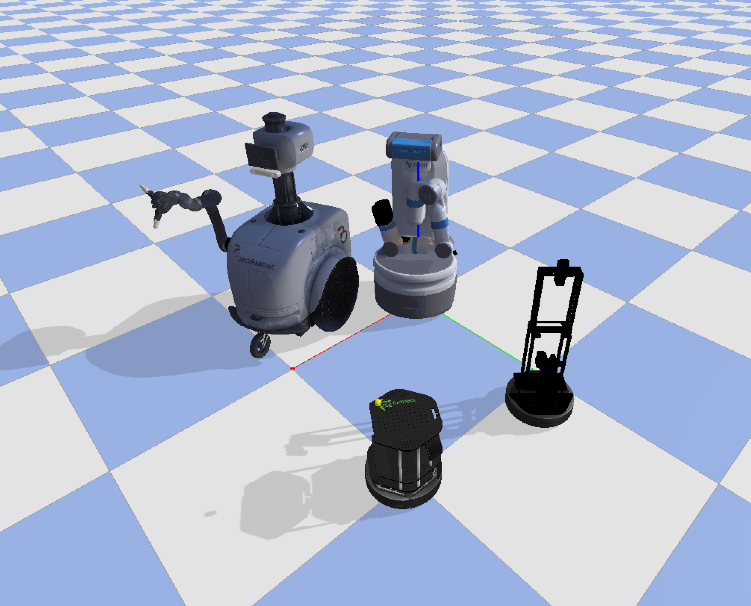
In this example, we import four different robots into PyBullet. We keep them still for around 10 seconds and then move them with small random actions for another 10 seconds. The code can be found here: examples/demo/robot_example.py.
from gibson2.core.physics.robot_locomotors import Locobot, Turtlebot, JR2_Kinova, Fetch
from gibson2.utils.utils import parse_config
import os
import time
import numpy as np
import pybullet as p
import pybullet_data
def main():
p.connect(p.GUI)
p.setGravity(0,0,-9.8)
p.setTimeStep(1./240.)
floor = os.path.join(pybullet_data.getDataPath(), "mjcf/ground_plane.xml")
p.loadMJCF(floor)
robots = []
config = parse_config('../configs/fetch_p2p_nav.yaml')
fetch = Fetch(config)
robots.append(fetch)
config = parse_config('../configs/jr_p2p_nav.yaml')
jr = JR2_Kinova(config)
robots.append(jr)
config = parse_config('../configs/locobot_p2p_nav.yaml')
locobot = Locobot(config)
robots.append(locobot)
config = parse_config('../configs/turtlebot_p2p_nav.yaml')
turtlebot = Turtlebot(config)
robots.append(turtlebot)
positions = [
[0, 0, 0],
[1, 0, 0],
[0, 1, 0],
[1, 1, 0]
]
for robot, position in zip(robots, positions):
robot.load()
robot.set_position(position)
robot.robot_specific_reset()
robot.keep_still()
for _ in range(2400): # keep still for 10 seconds
p.stepSimulation()
time.sleep(1./240.)
for _ in range(2400): # move with small random actions for 10 seconds
for robot, position in zip(robots, positions):
action = np.random.uniform(-1, 1, robot.action_dim)
robot.apply_action(action)
p.stepSimulation()
time.sleep(1./240.0)
p.disconnect()
if __name__ == '__main__':
main()
The four robots will have a fun cocktail party like this: