Examples of simulator¶
Create a simple simulated environment¶
Here we show how to craete a simple simulated environment with one mesh and one robot. Use the config file in gibsonv2/examples/configs/turtlebot_p2p_nav.yaml. This example can be found at examples/demo/simulator_example.py.
import yaml
from gibson2.core.physics.robot_locomotors import Turtlebot
from gibson2.core.simulator import Simulator
from gibson2.core.physics.scene import BuildingScene, StadiumScene
from gibson2.utils.utils import parse_config
import pytest
import pybullet as p
import numpy as np
config = parse_config('turtlebot_p2p_nav.yaml')
s = Simulator(mode='gui', resolution=512)
scene = BuildingScene('Ohopee')
s.import_scene(scene)
turtlebot = Turtlebot(config)
s.import_robot(turtlebot)
for i in range(100):
s.step()
s.disconnect()
This example should show something like below, a turtlebot in a house.
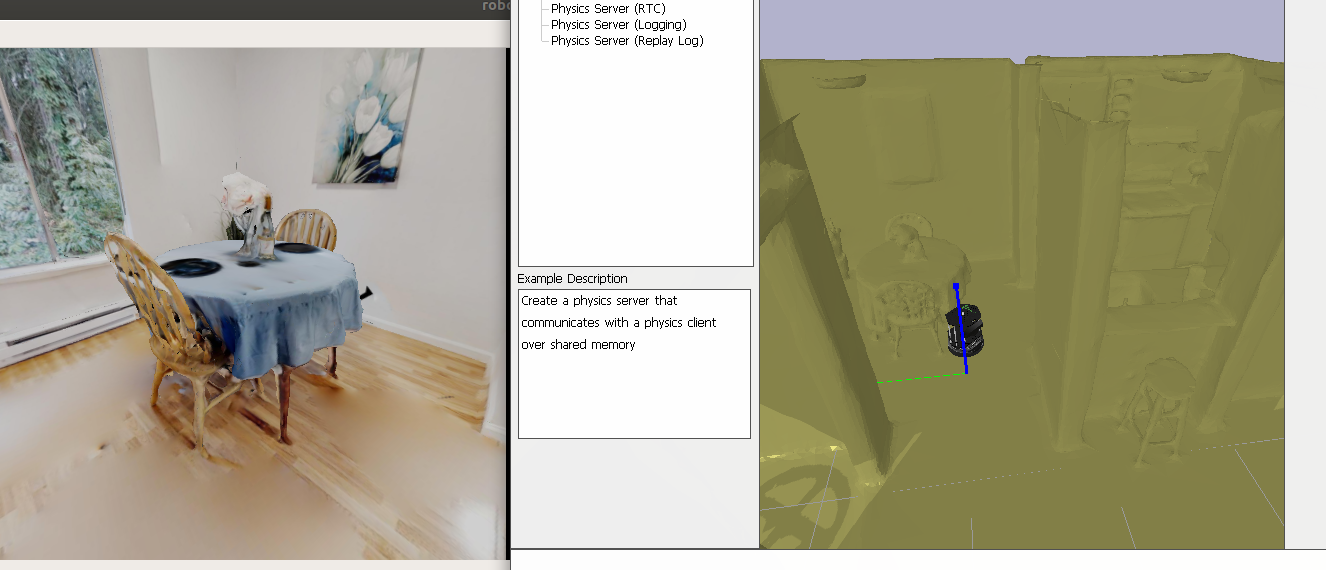
Adding a camera to this example:
for i in range(100):
turtlebot.apply_action([0.1,0.1])
s.step()
rgb = s.renderer.render_robot_cameras(modes=('rgb'))
With full physical simulation and rendering at 512x512, it runs at about 180 fps (don’t forget to switch to headless mode).
If we switch to render to pytorch tensor like below, it can run full physical simulation and rendering at 512x512 at 460 fps.
s = Simulator(mode='headless', resolution=512, render_to_tensor=False)
Simulate a robot and many objects¶
Here we show how to create a simulated environment with many objects
import yaml
from gibson2.core.physics.robot_locomotors import Turtlebot
from gibson2.core.simulator import Simulator
from gibson2.core.physics.scene import BuildingScene, StadiumScene
from gibson2.utils.utils import parse_config
import pytest
import pybullet as p
import numpy as np
config = parse_config('turtlebot_p2p_nav.yaml')
s = Simulator(mode='headless')
scene = BuildingScene('Ohopee')
s.import_scene(scene)
turtlebot = Turtlebot(config)
s.import_robot(turtlebot)
for i in range(30):
obj = YCBObject('003_cracker_box')
s.import_object(obj)
for i in range(100):
s.step()
s.disconnect()
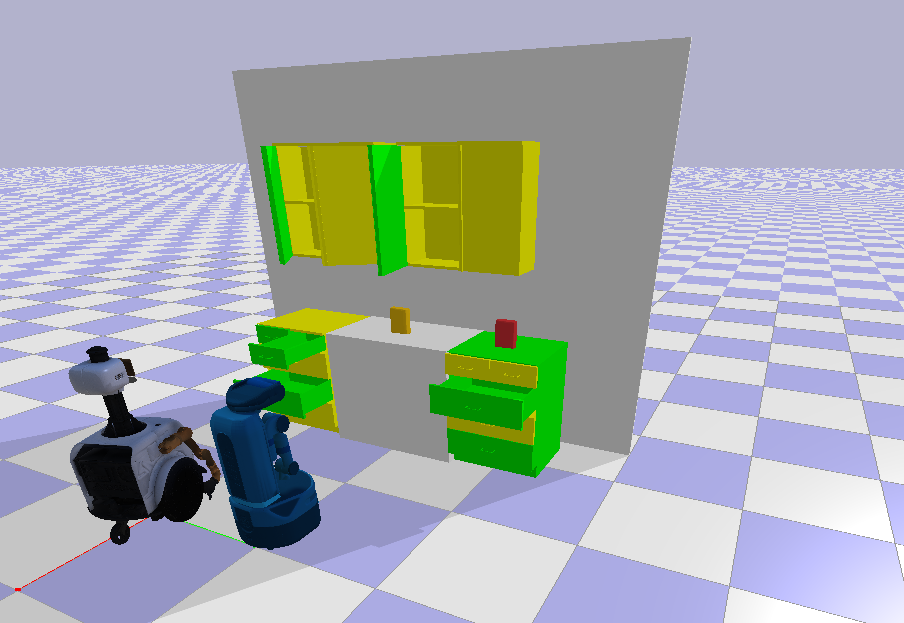
Simulate articulated objects / Complex scenes¶
import yaml
from gibson2.core.physics.robot_locomotors import Turtlebot, JR2_Kinova, Fetch
from gibson2.core.simulator import Simulator
from gibson2.core.physics.scene import EmptyScene
from gibson2.core.physics.interactive_objects import InteractiveObj, BoxShape, YCBObject
from gibson2.utils.utils import parse_config
import pytest
import pybullet as p
import numpy as np
config = parse_config('../configs/jr_interactive_nav.yaml')
s = Simulator(mode='gui')
scene = EmptyScene()
s.import_scene(scene)
jr = JR2_Kinova(config)
s.import_robot(jr)
jr.robot_body.reset_position([0,0,0])
jr.robot_body.reset_orientation([0,0,1,0])
fetch = Fetch(config)
s.import_robot(fetch)
fetch.robot_body.reset_position([0,1,0])
fetch.robot_body.reset_orientation([0,0,1,0])
obj = InteractiveObj(filename='/data4/mdv0/cabinet/0007/part_objs/cabinet_0007.urdf')
s.import_interactive_object(obj)
obj.set_position([-2,0,0.5])
obj = InteractiveObj(filename='/data4/mdv0/cabinet/0007/part_objs/cabinet_0007.urdf')
s.import_interactive_object(obj)
obj.set_position([-2,2,0.5])
obj = InteractiveObj(filename='/data4/mdv0/cabinet/0004/part_objs/cabinet_0004.urdf')
s.import_interactive_object(obj)
obj.set_position([-2.1, 1.6, 2])
obj = InteractiveObj(filename='/data4/mdv0/cabinet/0004/part_objs/cabinet_0004.urdf')
s.import_interactive_object(obj)
obj.set_position([-2.1, 0.4, 2])
obj = BoxShape([-2.05,1,0.5], [0.35,0.6,0.5])
s.import_interactive_object(obj)
obj = BoxShape([-2.45,1,1.5], [0.01,2,1.5])
s.import_interactive_object(obj)
p.createConstraint(0,-1,obj.body_id, -1, p.JOINT_FIXED, [0,0,1], [-2.55,1,1.5], [0,0,0])
obj = YCBObject('003_cracker_box')
s.import_object(obj)
p.resetBasePositionAndOrientation(obj.body_id, [-2,1,1.2], [0,0,0,1])
obj = YCBObject('003_cracker_box')
s.import_object(obj)
p.resetBasePositionAndOrientation(obj.body_id, [-2,2,1.2], [0,0,0,1])
for i in range(100):
s.step()
s.disconnect()
The resulting scene looks like below: