Examples of renderer¶
Use the mesh renderer¶
You can use the mesh renderer to render a Gibson mesh within lines of code:
import cv2
import sys
import numpy as np
from gibson2.core.render.mesh_renderer.mesh_renderer_cpu import VisualObject, InstanceGroup, MeshRenderer
if __name__ == '__main__':
model_path = sys.argv[1]
renderer = MeshRenderer(width=512, height=512)
renderer.load_object(model_path)
renderer.add_instance(0)
print(renderer.visual_objects, renderer.instances)
print(renderer.materials_mapping, renderer.mesh_materials)
camera_pose = np.array([0, 0, 1.2])
view_direction = np.array([1, 0, 0])
renderer.set_camera(camera_pose, camera_pose + view_direction, [0, 0, 1])
renderer.set_fov(90)
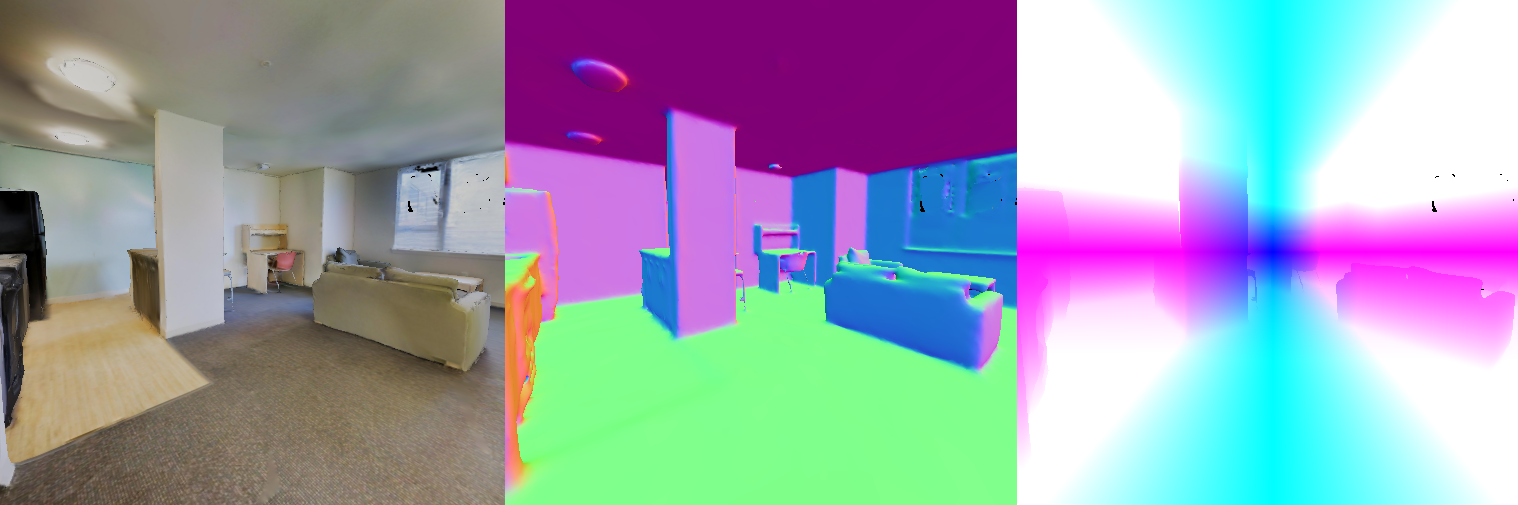
frame = renderer.render(modes=('rgb', 'normal', '3d'))
Create a FPS style interactive mesh renderer¶
The code can be found in examples/demo/mesh_renderer_example.py.
import cv2
import sys
import numpy as np
from gibson2.core.render.mesh_renderer.mesh_renderer_cpu import VisualObject, InstanceGroup, MeshRenderer
if __name__ == '__main__':
model_path = sys.argv[1]
renderer = MeshRenderer(width=512, height=512)
renderer.load_object(model_path)
renderer.add_instance(0)
print(renderer.visual_objects, renderer.instances)
print(renderer.materials_mapping, renderer.mesh_materials)
camera_pose = np.array([0, 0, 1.2])
view_direction = np.array([1, 0, 0])
renderer.set_camera(camera_pose, camera_pose + view_direction, [0, 0, 1])
renderer.set_fov(90)
px = 0
py = 0
_mouse_ix, _mouse_iy = -1, -1
down = False
def change_dir(event, x, y, flags, param):
global _mouse_ix, _mouse_iy, down, view_direction
if event == cv2.EVENT_LBUTTONDOWN:
_mouse_ix, _mouse_iy = x, y
down = True
if event == cv2.EVENT_MOUSEMOVE:
if down:
dx = (x - _mouse_ix) / 100.0
dy = (y - _mouse_iy) / 100.0
_mouse_ix = x
_mouse_iy = y
r1 = np.array([[np.cos(dy), 0, np.sin(dy)], [0, 1, 0], [-np.sin(dy), 0, np.cos(dy)]])
r2 = np.array([[np.cos(-dx), -np.sin(-dx), 0], [np.sin(-dx), np.cos(-dx), 0], [0, 0, 1]])
view_direction = r1.dot(r2).dot(view_direction)
elif event == cv2.EVENT_LBUTTONUP:
down = False
cv2.namedWindow('test')
cv2.setMouseCallback('test', change_dir)
while True:
frame = renderer.render(modes=('rgb', 'normal', '3d'))
cv2.imshow('test', cv2.cvtColor(np.concatenate(frame, axis=1), cv2.COLOR_RGB2BGR))
q = cv2.waitKey(1)
if q == ord('w'):
px += 0.05
elif q == ord('s'):
px -= 0.05
elif q == ord('a'):
py += 0.05
elif q == ord('d'):
py -= 0.05
elif q == ord('q'):
break
camera_pose = np.array([px, py, 1.2])
renderer.set_camera(camera_pose, camera_pose + view_direction, [0, 0, 1])
renderer.release()
Sample rendering results with ‘Ribera’ scene would look like below:
Use the mesh renderer to render to tensor¶
You can use gibson’s mesh renderer to render to a pytorch tensor, and it is extremely fast. Pytorch installation is required (otherwise, gibson simulator is not dependent on pytorch.)
The code can be found in examples/demo/mesh_renderer_example.py.
import cv2
import sys
import numpy as np
from gibson2.core.render.mesh_renderer.mesh_renderer_tensor import MeshRendererG2G
from gibson2.core.render.profiler import Profiler
import matplotlib.pyplot as plt
import torch
if __name__ == '__main__':
model_path = sys.argv[1]
renderer = MeshRendererG2G(width=512, height=512, device_idx=0)
renderer.load_object(model_path)
renderer.add_instance(0)
print(renderer.visual_objects, renderer.instances)
print(renderer.materials_mapping, renderer.mesh_materials)
camera_pose = np.array([0, 0, 1.2])
view_direction = np.array([1, 0, 0])
renderer.set_camera(camera_pose, camera_pose + view_direction, [0, 0, 1])
renderer.set_fov(90)
for i in range(3000):
with Profiler('Render'):
frame = renderer.render(modes=('rgb', 'normal'))
print(frame)
img_np = frame[0].flip(0).data.cpu().numpy().reshape(renderer.height, renderer.width, 4)
normal_np = frame[1].flip(0).data.cpu().numpy().reshape(renderer.height, renderer.width, 4)
plt.imshow(np.concatenate([img_np, normal_np], axis=1))
plt.show()
renderer.release()
On Ribera scene, rendering ‘rgb’ and ‘normal’ at 512x512 on a GTX 1080ti, a framerate of 1300+ fps can be achieved.