Features
Blue indicates iGibson 2.0 features and red indicates iGibson 1.0 features.Object States
iGibson 2.0 supports object states, including temperature, wetness level, cleanliness level, and toggled and sliced states, necessary to cover a wider range of tasks.
Predicate Logic Functions
iGibson 2.0 implements a set of predicate logic functions that map the simulator states to logic states like Cooked or Soaked.
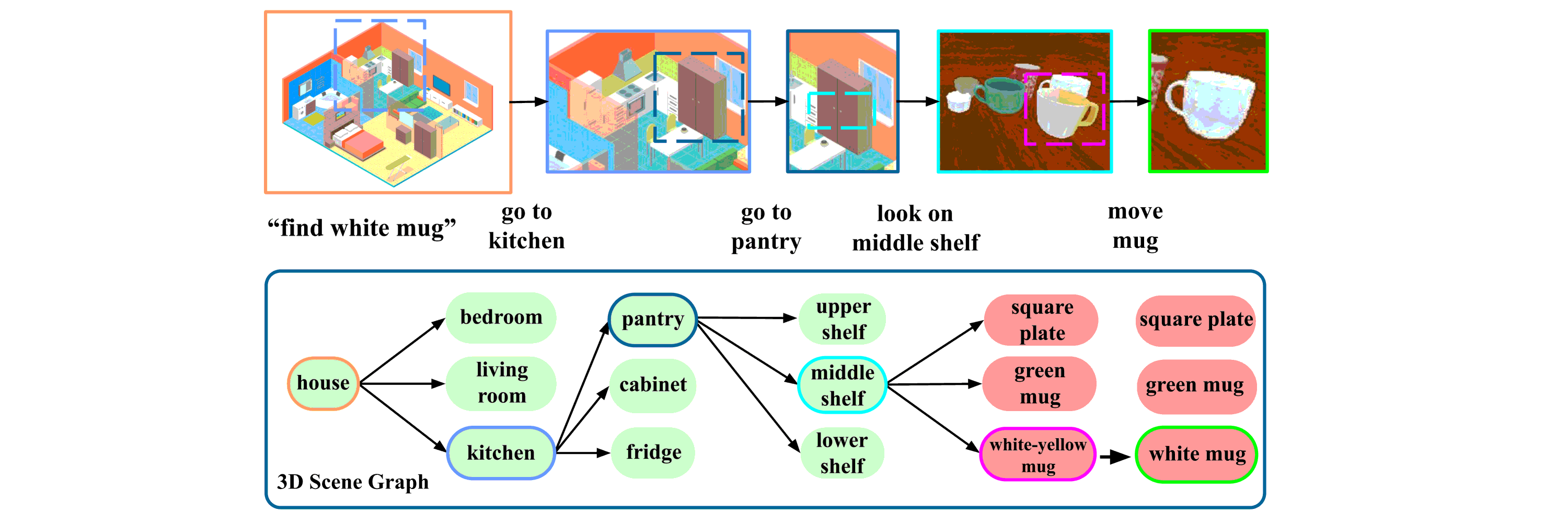
Generative System
Given a logic state, iGibson 2.0 can sample valid physical states that satisfy it. It can generate infinite instances of tasks with minimal human effort.
VR Interaface
iGibson 2.0 includes a virtual reality (VR) interface to immerse humans in its scenes to collect demonstrations.
Interactive Scenes
We released iGibson dataset, which consists of 15 fully interactive scenes and 500+ object models.
Compatibility with Large Scene Datasets
Support for 12000+ scenes from CubiCasa5K and 3D-Front with full interaction. Backward compatibility GibsonV1's 572 buildings.
Robot Models
of the most common real robots and AI agents: Fetch and Freight, Husky, TurtleBot v2, Locobot, Minitaur, JackRabbot, a generic quadrocopter, Humanoid and Ant.
Physically Realistic Articulated Objects
Additional annotation of materials and dynamic properties on top of PartNet and Motion Dataset for more realistic simulation.
Fast Physics-Based Rendering and Physics
Achieving more than 100 fps with full-physics on fully-interactive scenes. More than 400 fps for rendering only.
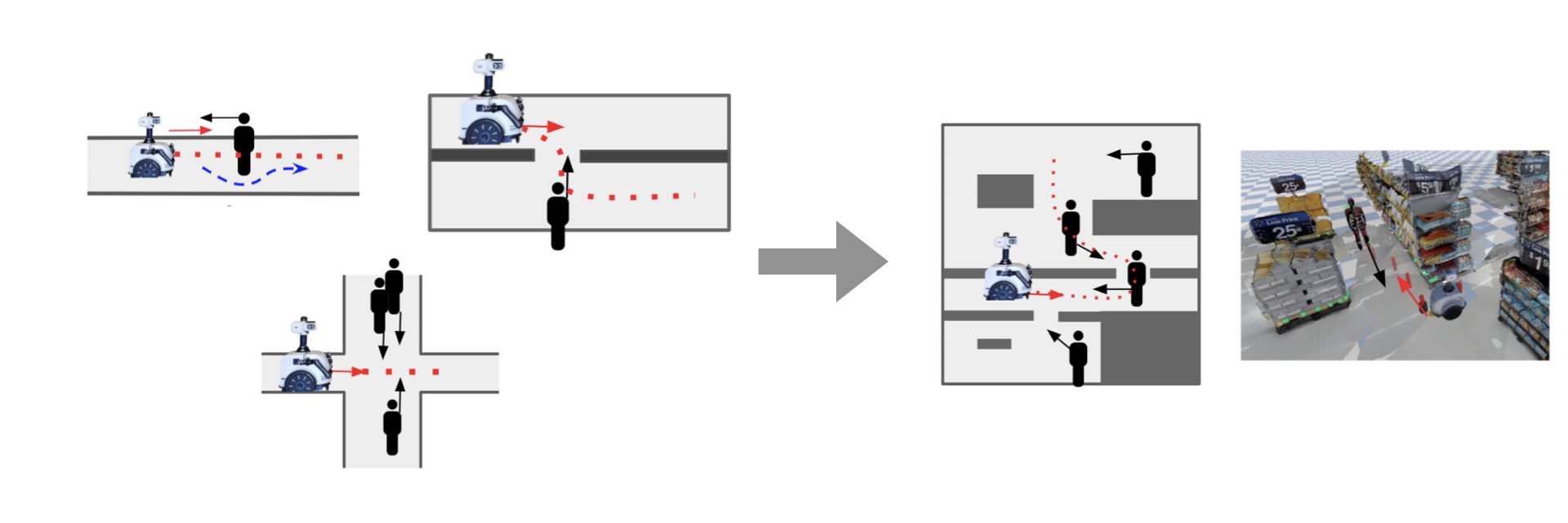
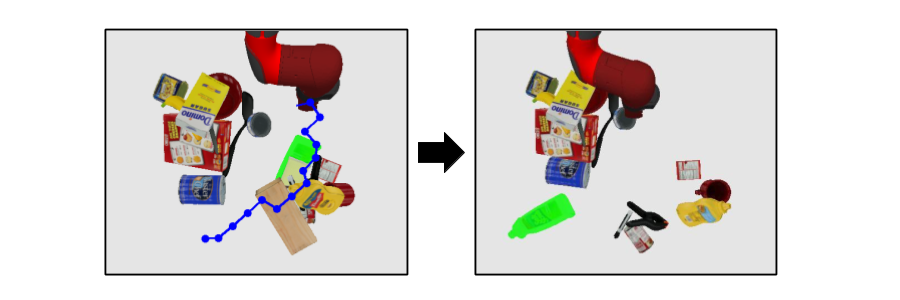
Motion Planning and Human-iG Interface
Built in motion planners (e.g. RRT, BiRRT, LazyPRM) for arm and base. Intuitive Human-iG interface for efficient demonstration collection.
Multi-Agent Support
to train in collaborative or adversarial setups, where an arbitrary number of agents can see and interact with each other.
Reinforcement Learning Baselines
Reinforcement learning starter code for navigation tasks with visual and LiDAR signals using SAC.
Comparison to other environments:
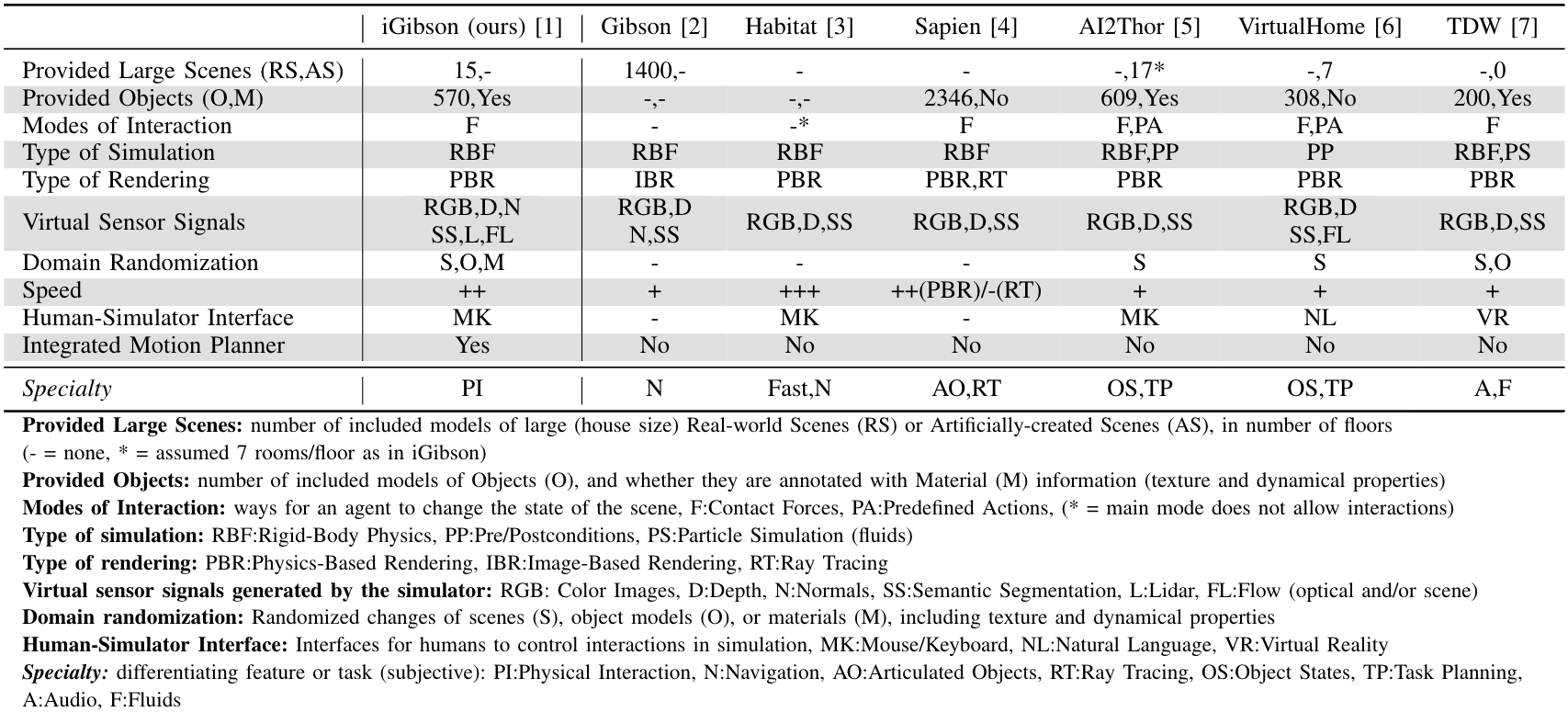
[iGibson, 1] [Gibson, 2] [Habitat, 3] [SAPIEN, 4] [AI2-THOR, 5] [VirtualHome, 6] [ThreeDWorld, 7]
 Fei Xia
Fei Xia
 Bokui (William) Shen
Bokui (William) Shen
 Chengshu Li
Chengshu Li
 Michael Lingelbach
Michael Lingelbach
 Cem Gokmen
Cem Gokmen
 Micael Tchapmi
Micael Tchapmi
 Lyne Tchapmi
Lyne Tchapmi
 Kent Vainio
Kent Vainio
 Claudia Perez D'Arpino
Claudia Perez D'Arpino
 Sanjana Srivastava
Sanjana Srivastava
 Shyamal Buch
Shyamal Buch
 Linxi (Jim) Fan
Linxi (Jim) Fan
 Guanzhi Wang
Guanzhi Wang
 Andrey Kurenkov
Andrey Kurenkov
 Gokul Dharan
Gokul Dharan
 Tanish Jain
Tanish Jain
 Roberto Martín-Martín
Roberto Martín-Martín
 Karen Liu
Karen Liu
 Hyo Gweon
Hyo Gweon
 Jiajun Wu
Jiajun Wu
 Li Fei-Fei
Li Fei-Fei
 Silvio Savarese
Silvio Savarese