Objects¶
Overview¶
We provide a wide variety of Objects that can be imported into the Simulator.
YCBObjectRBOObjectShapeNetObjectPedestrianArticulatedObjectURDFObjectSoftObjectCubeVisualMarkerVisualShape
Typically, they take in the name or the path of an object (in igibson.assets_path) and provide a load function that be invoked externally (usually by import_object and import_object of Simulator). The load function imports the object into PyBullet. Some Objects (e.g. ArticulatedObject) also provide APIs to get and set the object pose.
Most of the code can be found here: igibson/objects.
Adding other objects to iGibson¶
We provide detailed instructions and scripts to import your own objects (non-articulated) into iGibson.
Instruction can be found here: External Objects.
Examples¶
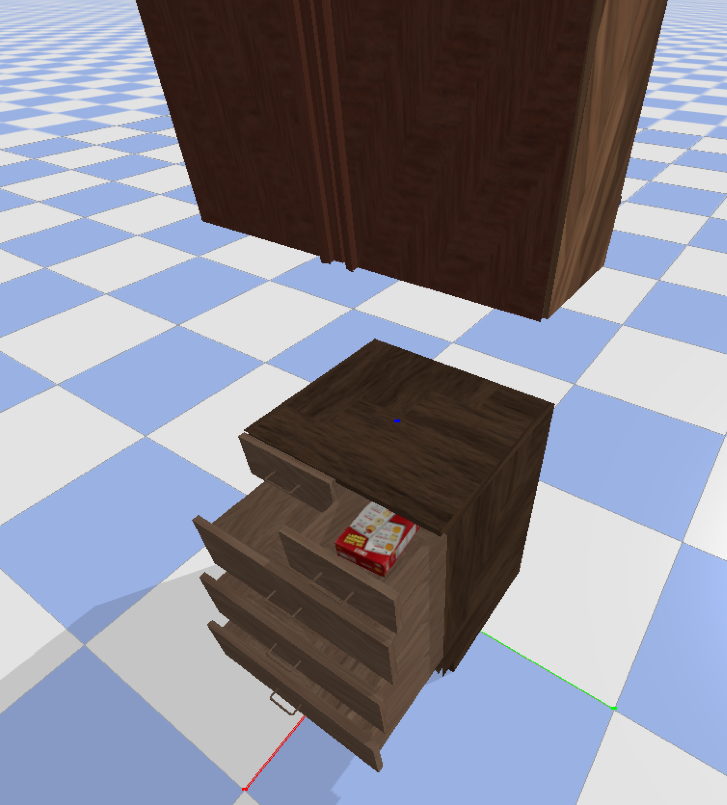
In this example, we import three objects into PyBullet, two of which are articulated objects. The code can be found here: igibson/examples/demo/object_example.py.
from igibson.objects.ycb_object import YCBObject
from igibson.objects.articulated_object import ArticulatedObject
import igibson
import os
import pybullet as p
import pybullet_data
import time
def main():
p.connect(p.GUI)
p.setGravity(0, 0, -9.8)
p.setTimeStep(1./240.)
floor = os.path.join(pybullet_data.getDataPath(), "mjcf/ground_plane.xml")
p.loadMJCF(floor)
cabinet_0007 = os.path.join(
igibson.assets_path, 'models/cabinet2/cabinet_0007.urdf')
cabinet_0004 = os.path.join(
igibson.assets_path, 'models/cabinet/cabinet_0004.urdf')
obj1 = ArticulatedObject(filename=cabinet_0007)
obj1.load()
obj1.set_position([0, 0, 0.5])
obj2 = ArticulatedObject(filename=cabinet_0004)
obj2.load()
obj2.set_position([0, 0, 2])
obj3 = YCBObject('003_cracker_box')
obj3.load()
obj3.set_position_orientation([0, 0, 1.2], [0, 0, 0, 1])
for _ in range(24000): # at least 100 seconds
p.stepSimulation()
time.sleep(1./240.)
p.disconnect()
if __name__ == '__main__':
main()
You can open the cabinet and the drawer by dragging your mouse over them. You can even put the cereal box into the drawer like this: