Overview of Modules
Next, we will give an overview of iGibson and briefly explain the different modules in our system.
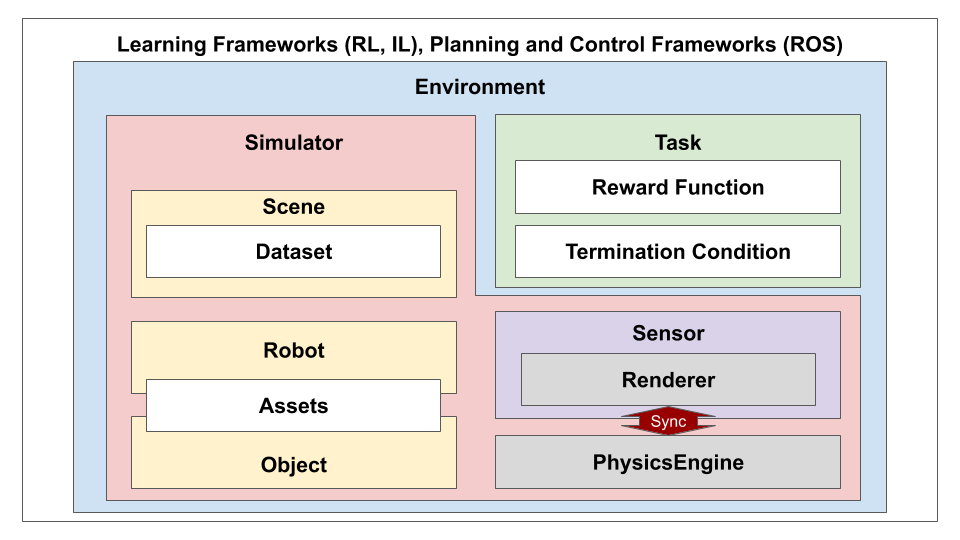
First of all, we have Datasets and Assets. Datasets include the 3D reconstructed real-world environments (iGibson Dataset), and 3D models of objects (BEHAVIOR Dataset of Objects). Assets contain models of robots and some additional 3D objects. The download guide for the assets can be found here. More info can be found in the sections Datasets and Assets.
Next, we have Renderer and PhysicsEngine. These are the two pillars that ensure the visual and physics fidelity of iGibson. We developed our own renderer that supports customizable camera configuration, physics-based rendering (PBR) and various image modalities, and renders at a lightening speed. We use the open-sourced PyBullet as our underlying physics engine. It can simulate rigid body collision and joint actuation for robots and articulated objects in an accurate and efficient manner. Since we are using MeshRenderer for rendering and PyBullet for physics simulation, we need to keep them synchronized at all time. Our code have already handled this for you. More info can be found here: Renderer.
Furthermore, we have Scene, Object, Robot, and Simulator.
Scene loads 3D scene meshes from igibson.g_dataset_path, igibson.ig_dataset_path and loads/holds the list of objects associated with an interactive scene.
Object loads interactable objects from igibson.assets_path.
Robot loads robots from igibson.assets_path.
Simulator maintains an instance of Renderer and PhysicsEngine and provides APIs to import Scene, Object and Robot into both of them and keep them synchronized at all time.
More info can be found here: Scene, Object, Robot, and Simulator.
Moreover, we have Task, Sensor and Environment. Task defines the task setup and includes a list of Reward Function and Termination Condition. It also provides task-specific reset functions and task-relevant observation definition. Sensor provides a light wrapper around Render to retrieve sensory observation. Environment follows the OpenAI gym convention and provides an API interface for external applications. More info can be found here: Environment.
Finally, any learning framework (e.g. RL, IL) or planning and control framework (e.g. ROS) can be used with Environment as long as they accommodate the OpenAI gym interface. We provide tight integration with ROS that allows for evaluation and visualization of, say, ROS Navigation Stack, in iGibson. More info can be found here: Learning Framework and ROS.
We highly recommend you go through each of the Modules below for more details and code examples.