Renderer¶
Overview¶
We developed our own MeshRenderer that supports customizable camera configuration and various image modalities, and renders at a lightening speed. Specifically, you can specify image width, height and vertical field of view in the constructor of class MeshRenderer. Then you can call renderer.render(modes=('rgb', 'normal', 'seg', '3d', 'optical_flow', 'scene_flow')) to retrieve the images. Currently we support six different image modalities: RGB, surface normal, segmentation, 3D point cloud (z-channel can be extracted as depth map), optical flow, and scene flow. We also support two types of LiDAR sensors: 1-beam and 16-beam (like Velodyne VLP-16). Most of the code can be found in igibson/render.
Examples¶
Simple Example¶
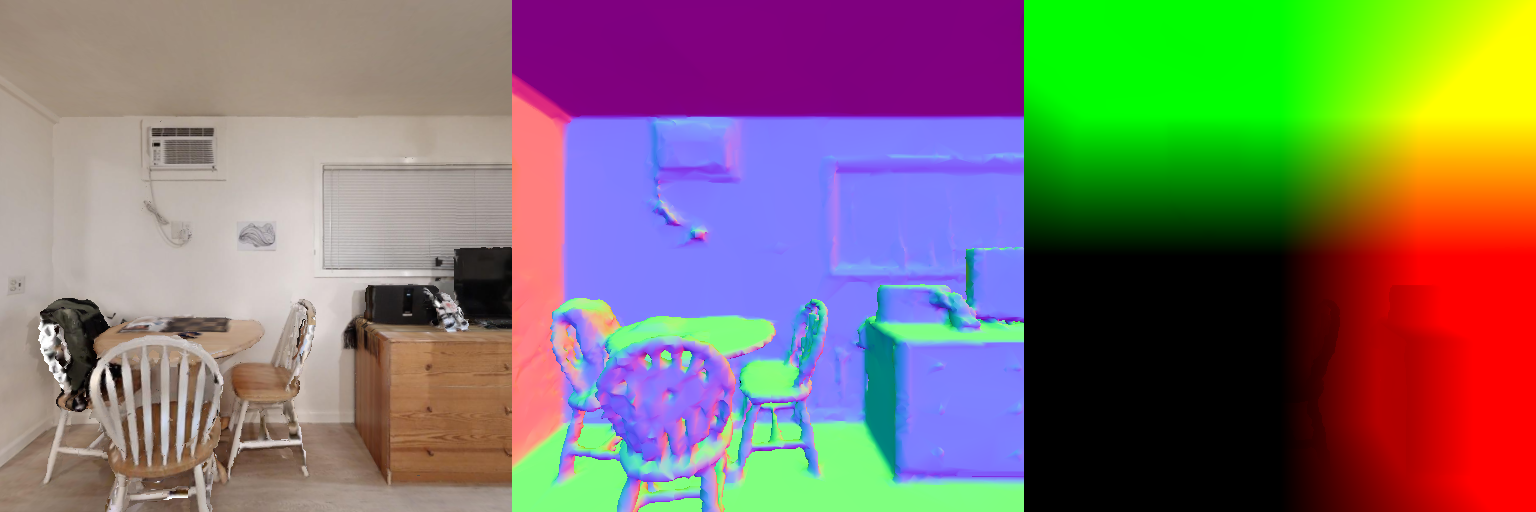
In this example, we render an iGibson scene with a few lines of code. The code can be found in igibson/examples/demo/mesh_renderer_simple_example.py.
import cv2
import sys
import os
import numpy as np
from igibson.render.mesh_renderer.mesh_renderer_cpu import MeshRenderer
from igibson.utils.assets_utils import get_scene_path
def main():
if len(sys.argv) > 1:
model_path = sys.argv[1]
else:
model_path = os.path.join(get_scene_path('Rs'), 'mesh_z_up.obj')
renderer = MeshRenderer(width=512, height=512)
renderer.load_object(model_path)
renderer.add_instance(0)
camera_pose = np.array([0, 0, 1.2])
view_direction = np.array([1, 0, 0])
renderer.set_camera(camera_pose, camera_pose + view_direction, [0, 0, 1])
renderer.set_fov(90)
frames = renderer.render(
modes=('rgb', 'normal', '3d'))
frames = cv2.cvtColor(np.concatenate(frames, axis=1), cv2.COLOR_RGB2BGR)
cv2.imshow('image', frames)
cv2.waitKey(0)
if __name__ == '__main__':
main()
For Rs scene, the rendering results will look like this:
Interactive Example¶
In this example, we show an interactive demo of MeshRenderer.
python -m igibson.examples.demo.mesh_renderer_example
You may translate the camera by pressing “WASD” on your keyboard and rotate the camera by dragging your mouse. Press Q to exit the rendering loop. The code can be found in igibson/examples/demo/mesh_renderer_example.py.
PBR (Physics-Based Rendering) Example¶
You can test the physically based renderer with the PBR demo. You can render any objects included in iG dataset, here we show a sink for example, as it includes different materials. You need to pass in a folder, since it will load all obj files in the folder.
python -m igibson.examples.demo.mesh_renderer_example_pbr <path to ig_dataset>/objects/sink/sink_1/shape/visual
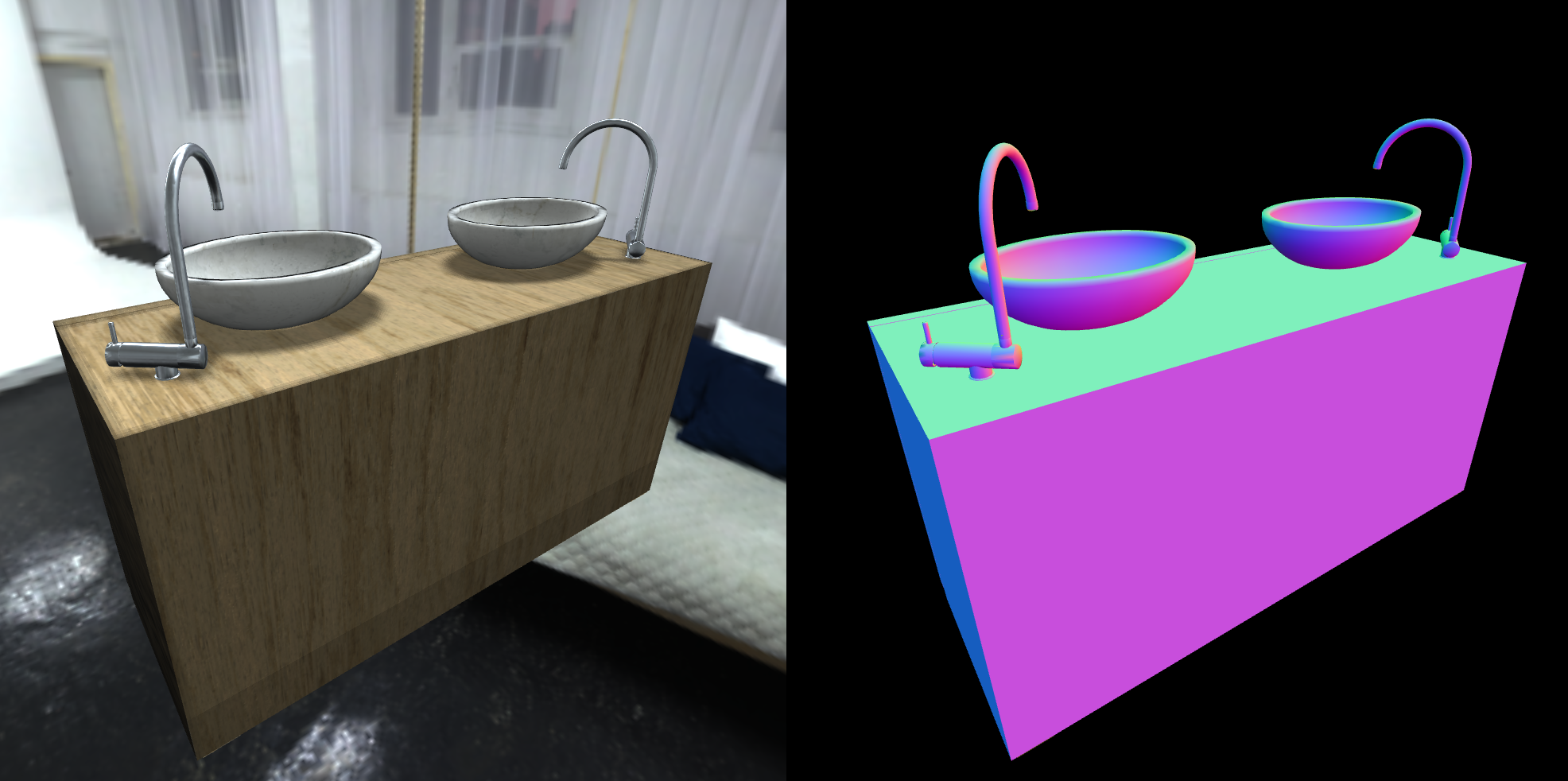
You will get a nice rendering of the sink, and should see the metal parts have specular highlgihts, and shadows should be casted.
Velodyne VLP-16 Example¶
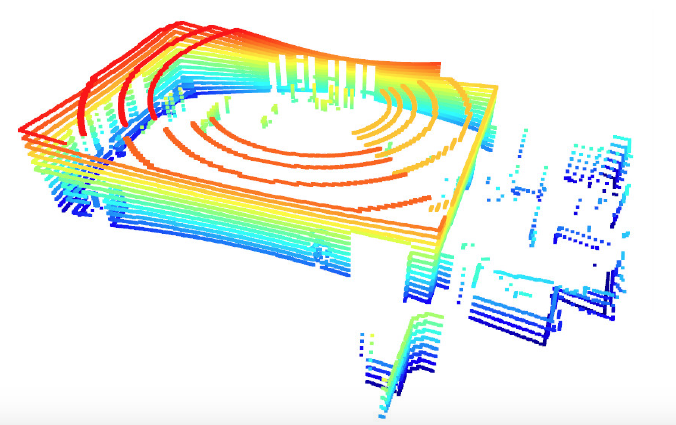
In this example, we show a demo of 16-beam Velodyne VLP-16 LiDAR placed on top of a virtual Turtlebot. The code can be found in igibson/examples/demo/lidar_velodyne_example.py.
The Velodyne VLP-16 LiDAR visualization will look like this:
Render to PyTorch Tensors¶
In this example, we show that MeshRenderer can directly render into a PyTorch tensor to maximize efficiency. PyTorch installation is required (otherwise, iGibson does not depend on PyTorch). The code can be found in igibson/examples/demo/mesh_renderer_gpu_example.py.